RK-bot is the autonomous ground vehicle (UGV), designed to perform various agricultural and auxiliary tasks.
Purpose
The vehicle should provide a full life cycle for growing potatoes:
- planting;
- weeding;
- plants condition monitoring (including a vegetation indices);
- pest protection;
- fertilizer application;
- harvesting.
In addition, the vehicle can be used to perform other auxiliary tasks. For example, as an automatic mower.
Concept
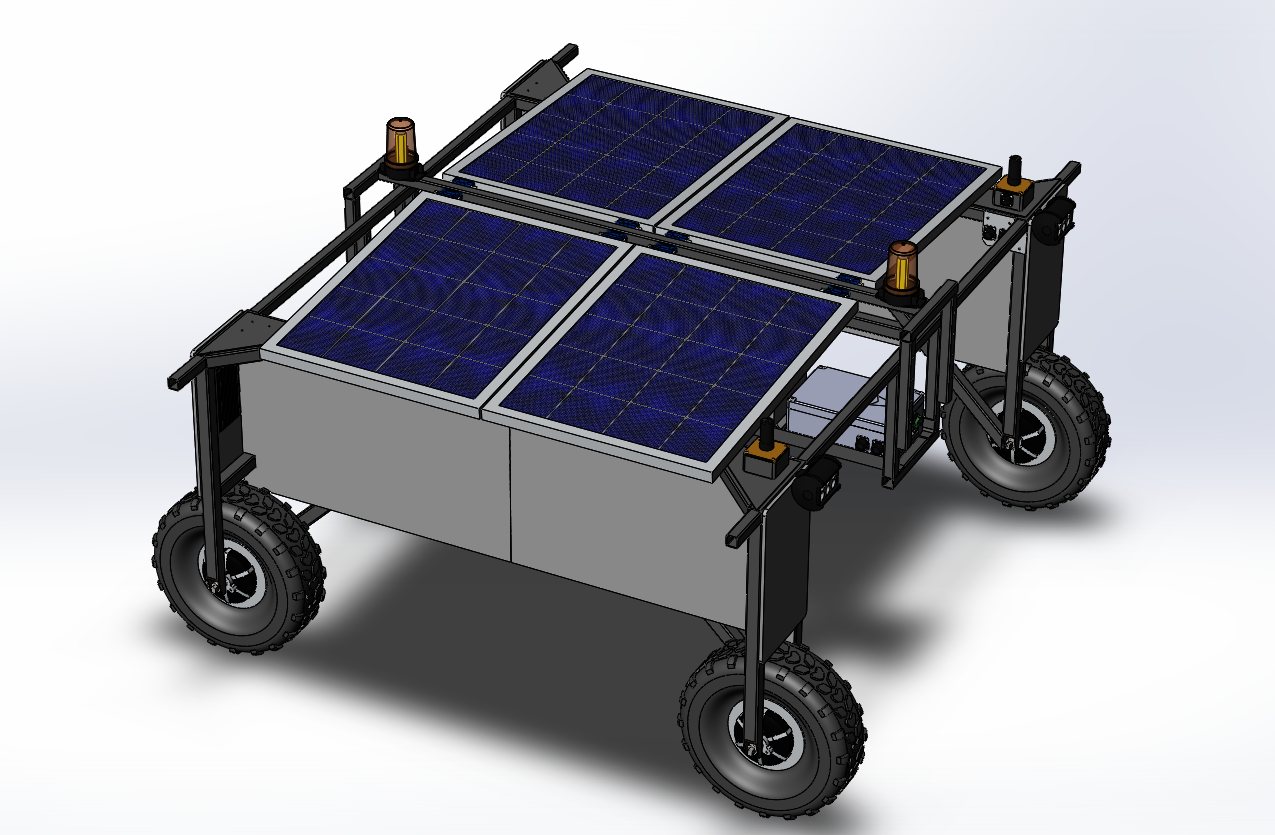
RK-bot is powered by 2 lead-acid batteries (onboard voltage 24V) and equipped with 4 motor wheels (250 W power each).
To carry out work at all stages of the life cycle of a potato, the vehicle must be able to move both in an empty field and in sprouted (with tops). Chassis has a monstrously high clearance to ride along the furrows and not break the potato tops. Robot design provides for the simultaneous processing of two furrows of the potato field.
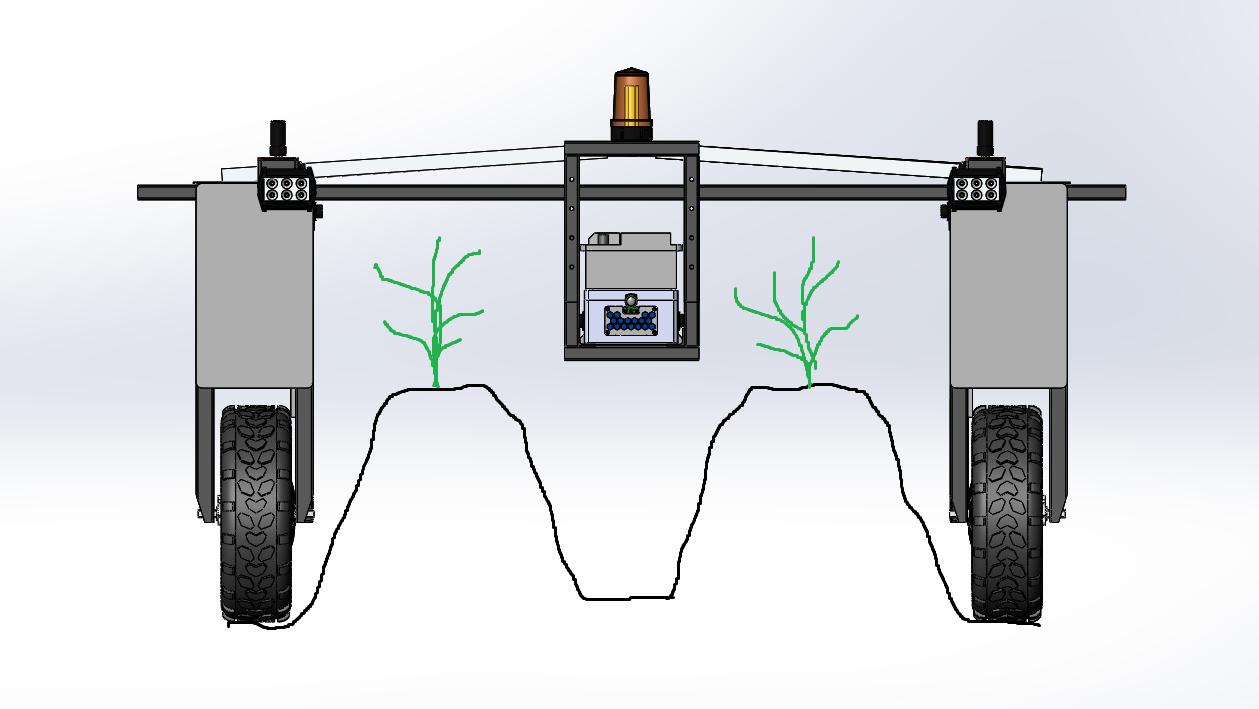
Vehicle width should be equal to the doubled furrow width. Since the width of the furrow can vary the vehicle track width can be easily adjusted. The vehicle is structurally composed of three large blocks: two side frames and a central compartment, interconnected by transverse elements. The sides are bolted to the cross members. Changing the track width is carried out by moving the sides frames closer/farther to the central compartment, followed by fixing to other holes.

Engineering & testing
Sorry, at this moment engineering reports only accessible in russian (I’ll try to translate it later… if I have time):
- Робот-колхозник: анонс
- Робот-колхозник: рама
- Робот-колхозник: испытания платформы
- Робот-колхозник: испытания 08.20
- Робот-колхозник: испытания 01.22
Current status of the project
UPD 01/18/2022: Solar panels added for additional battery charging. Fixed bug with steering control. Wheel speeds not aligned. In general, the platform is ready to install actuators and tools.
UPCOMING: Tools will be installed — a mower or manipulators.
Gallery

Platform ready for test 
Control unit 
RK-bot in garage / operation room 
Potato field test 
Potato field test 
Winter test 
Winter test






Video
Contacts
If you have any questions about this project or want to offer cooperation — feel free to contact me:
on LinkedIn
by email (engineering20380@gmail.com)