
Несмотря на пандемию коронавируса COVID-19 и приближающийся кризис капитализма, группа лиц по предварительному сговору выдвинулась в сельскую местность, чтобы там самоизолироваться и начать работы по сборке частей робота-колхозника в единое целое.
Задачи ставились следующие:
- Собрать механическую платформу робота;
- Установить драйверы, АКБ и сделать объёмный монтаж;
- Испытать платформу на месте;
- Если всё пойдет хорошо, провести пробный заезд.
Кроме того, работу никто не отменял. А работать приходилось в сложных условиях. Основной помехой был «биологический фактор» 🙂

Сборка платформы
Саму раму и первые два колеса я собрал быстро — они уже ставились на раму и сюрпризов тут не ожидалось.

К сожалению, коварный вирус внёс все-таки некоторые коррективы в план работ. Из-за него в Санкт-Петербурге застряли последние два колеса для робота. Колеса приехали на место только 27-го апреля, к этому моменту рама простояла полусобранной уже неделю.
Когда приехали колеса, выяснилось, что одно из них дефектное (об этом было уже известно), а на другом резина плохо посажена на борт диска и колесо невозможно накачать. Для меня это могло стать проблемой, однако на месте нашлись специалисты по работе с резиной и колесо было накачено без жертв и разрушений.

Что касается дефектного колеса — с ним предстояло разобраться в процессе. Ну, а пока можно было установить, наконец, все элементы платформы и поставить робота на колеса.


Установка электрооборудования
Из всего электрооборудования у нас были только драйверы двигателей. Сначала надо было выбрать место установки. Тут особых вариантов и не было — драйвер сам так и просился в верхнюю секцию вилки бортовой рамы.

При последующей сборке надо будет закрыть это место, чтобы не летела грязь с колес и не заливались осадки сверху. А пока и так сойдет.
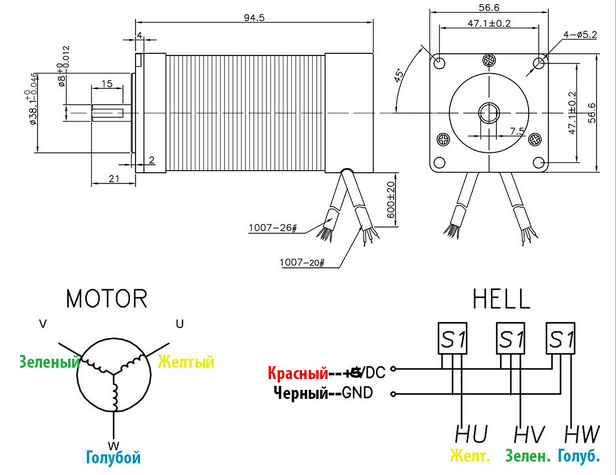
После этого началась долгая и мучительная возня с проводами. Первой проблемой тут сразу же стало подключение двигателей. На драйвере есть маркировка фаз «U,V,W«, а на выходе из колеса торчат только три провода (желтый, зеленый, синий) без каких-либо привязок к чему-либо. В интернете мне также не удалось найти для BLDC моторов какой-то стандарт, устанавливающий соответствие цветовой маркировки фазам двигателя. Искать пришлось методом научного тыка. Благо, там немного комбинаций. Уже потом, я обнаружил одну какую-то картинку, где были указаны цвета проводов именно для BLDC мотора.
После того, как колеса были подключены к драйверам, начался монтаж сигнальных проводов от драйверов к управляющему устройству (которого у нас не было) и силовых проводов от АКБ до драйверов. Для начала было определено место (в корме), где будет расположен блок управления. Почему именно в корме станет понятно чуть позже. В качестве сигнальных кабелей использовался ненужный моток витой пары.

Для испытаний были найдены на месте два свинцово-кислотных аккумулятора разной степени убитости. Хотелось бы, конечно, поставить новые, но и тут злобный вирус нам подложил свинью — купить АКБ в условиях вируса оказалось не так просто, к тому же ближайший населенный пункт с соответствующими магазинами оказался локальным очагом заражения (ссыль) и въезд туда ограничили. Пришлось использовать то, что было под руками.
«Швартовные» испытания
На раму установили автомат на 40А для защиты и чтобы удобно было снимать питание. После чего робот был установлен на пеньки, чтобы далеко не уехал в случае чего. А это самое «чего», по предварительным оценкам, должно было случиться сразу после подачи питания 🙂

Но сначала нужно было понять: а как же им управлять в наше неспокойное время? Для того, чтобы колеса куда-то поехали нужно:
- Подать на драйвер питание (с этим проблем не было);
- Подать на драйвер сигнал EN;
- Отпустить тормоза (сигнал BRAKE);
- Задать направление движения (сигнал F/R);
- И задать обороты (сигнал Sv).
И всё это нужно было сделать для 4-х драйверов без использования какого-либо контроллера или чего-то подобного (не было ничего). Автопилот для робота ещё не был закуплен, а поездить очень хотелось. Или хотя бы на пеньках покрутить колесами 🙂
Решение пришло мне в голову совершенно неожиданно и оказалось довольно простым. Все указанные сигналы (кроме Sv) имели внутреннюю подтяжку, а значит могли быть установлены с помощью простого тумблера. А их (тумблеров) у меня с собой было)

В корме была установлена специальная площадка из обрезков OSB, где предполагалась установка автопилота и прочей электроники. Туда и были заведены сигнальные провода при монтаже. Так как я все-таки надеялся поездить за пределами гаража — нужен был пульт управления, хотя бы проводной. Для этого на площадку был установлен разъем типа 2РМДТ 🙂 Сам пульт предстояло собрать из говна и палок. Благо, я захватил с собой панель с тумблерами, которая использовалась у меня для стендовых испытаний драйверов и колёс. Она и послужила основой для пульта.

Пульт получился самым простым из возможных — никакой электроники, никаких элементов питания. Только переключатели и кнопки. На пульт было выведено (слева направо):
- EN (сигнал включения) — общий на 4 колеса;
- F/R (сигнал направления) — левый борт;
- F/R (сигнал направления) — правый борт;
- BR (кнопка тормоза) — левый борт;
- BR (кнопка тормоза) — правый борт;
Такая компоновка сигналов позволяла не только тестировать платформу на месте, но и успешно управлять ей в движении. Для поворота в движении нужно зажать кнопку тормоза соответствующего борта. Для поворота на месте можно выставить сигналы направления бортов в разные стороны.
Так как никакого электронного управляющего устройства не было, то задавать скорость вращения колес пришлось вручную с помощью потенциометров на драйверах. Это создавало некоторые неудобства: нельзя было оперативно регулировать скорость и сама скорость у всех колес могла быть разной. Но такой подход позволял провести хоть какие-то испытания. И вот, после невыносимо долгой подготовки, робот-колхозник был установлен на пеньки, аккумуляторы заряжены и все приготовились увидеть магию) И магия таки произошла…
Правда, заключалась она в том, что все колеса крутились не так как хотелось бы. Левый борт хорошо ехал вперед, но очень слабо назад — или совсем не стартовали или их можно было остановить рукой. Это удалось победить переключением обмоток двигателя. Правый борт крутился с повышенным шумом (хорошо слышно на видео). Шум издавал тот самый дефектный мотор.
Так как визуальный осмотр не выявил никаких отклонений в конструкции двигателя, причина такого поведения была совершенно непонятна. А времени уже оставалось мало. Точнее, два дня. От безысходности я стал перебирать все возможные варианты подключения обмоток. И, о чудо, колесо начало крутиться в нормальном режиме! Однако, на этом чудеса не закончились — внезапно я понял, что переключал только силовые провода, сигнальные (от датчиков Холла) оставались на месте. И в рабочей конфигурации цвета проводов силовых и сигнальных не совпадают.

Единственное объяснение, которое я нашел — что наши китайские друзья при изготовлении перепутали цвета проводов. Но проверить это не представляется возможным — они уходят куда-то совсем глубоко внутрь двигателя. Ну да этот вопрос меня уже не сильно волновал. Главное — что все колеса, наконец-то, крутились как надо.
Ходовые испытания
А это значит, что можно было наконец-то выгнать робота из гаража и проверить на что он способен.

Оказалось, что платформа вполне успешно ездит, и даже поворачивает. Причем, поворачивает как на месте (вразнотяг — один борт в одну сторону, другой — в другую), так и в движении (торможением одного из бортов). Разворот на месте мне не очень понравился — все-таки машина слишком длинная для таких фокусов. Возможно, надо будет уменьшить длину рамы, хотя это очень трудоемко — придется варить новые бортовые элементы.
В целом, я оцениваю испытания как успешные. Это именно то, что я хотел увидеть. Следующим этапом будет установка автопилота, камер и другого электрооборудования. Но это будет уже в августе 🙂 А пока робота надо законсервировать — снять с него АКБ, открутить пульт и приткнуть его куда-нибудь, чтобы не мешался.

Стоянка робота — это отдельная проблема, которую надо будет решать в августе. В прошлый раз рама хранилась по частям, не занимая много места. Но теперь на ней установлены колеса и есть объемный монтаж, который мешает всё это разобрать. Оставлять всё это в собранном виде на улице под открытым небом — не вариант. Придется возводить какой-то гараж для робота. Но это уже совсем другая история 🙂