Проект беспилотной наземной машины (UGV — Unmanned Ground Vehicle), предназначенной для выполнения различных сельскохозяйственных и вспомогательных задач.
Назначение
Машина должна обеспечивать полный жизненный цикл выращивания картофеля:
- посадка;
- прополка (удаление сорняков);
- мониторинг состояния растений (в том числе построение вегетационных индексов);
- обработка растений от вредителей;
- внесение удобрений;
- сбор урожая.
Кроме того, машина может использоваться для выполнения других вспомогательных задач. Например, в качестве автоматической косилки.
Концепция
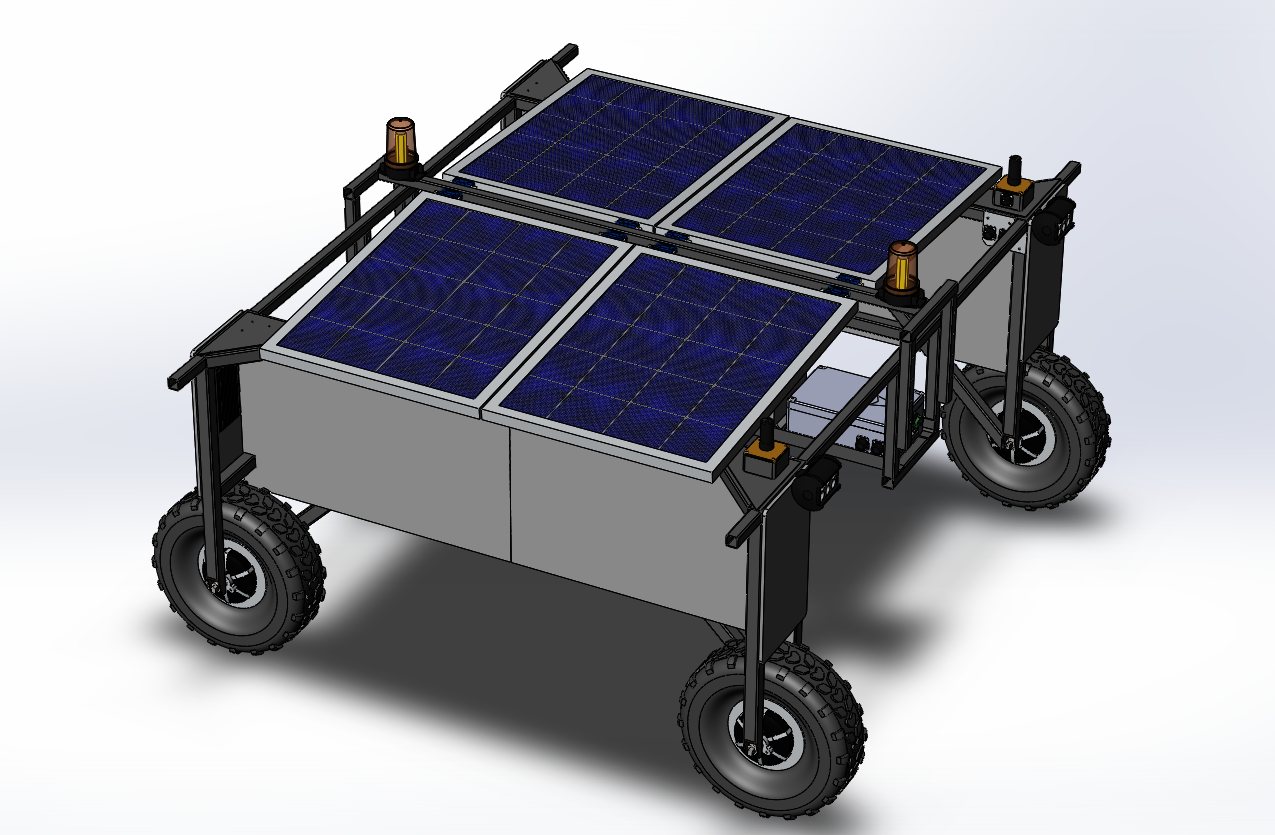
Машина полностью электрическая. Питание от двух свинцово-кислотных аккумуляторов (напряжение бортовой сети =24 В). В качестве движителей используются 4 мотор-колеса мощностью по 250 Вт каждое.
Для осуществления работ на всех этапах жизненного цикла картофеля, машина должна иметь возможность двигаться как по пустому полю, так и по пророщенному (с ботвой). Платформа имеет чудовищно высокий клиренс, чтобы ездить по бороздам и не ломать картофельную ботву. Конструкция робота предусматривает одновременную обработку двух борозд картофельного поля.
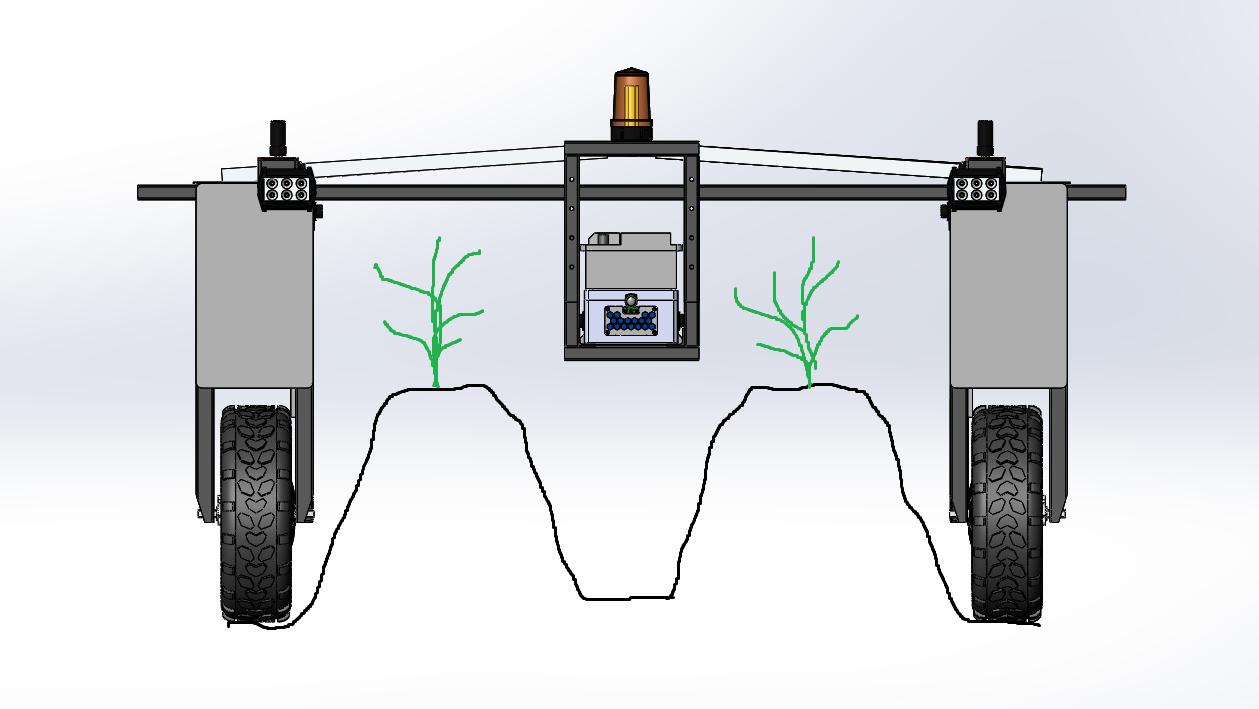
Ширина машины должна соответствовать двойной ширине борозды. Так как ширина борозды может различаться, ширина колеи так же должна быть изменяемой. Машина конструктивно составлена из трех больших блоков: две бортовые рамы и центральный отсек, соединенные между собой поперечными элементами. Борта крепятся к поперечинам при помощи болтов. Изменение ширины колеи производится перемещением бортов ближе к центральному отсеку с последующей фиксацией на другие отверстия.

Разработка
Процесс разработки и муки творчества изложены тут:
- Робот-колхозник: анонс
- Робот-колхозник: рама
- Робот-колхозник: испытания платформы
- Робот-колхозник: испытания 08.20
- Робот-колхозник: испытания 01.22
Текущее состояние
UPD 18.01.2022: Добавлены солнечные панели для дополнительной зарядки АКБ. Исправлен баг с управлением. Не выровнены скорости колес. В целом, платформа готова к установке полезных нагрузок.
На следующем этапе: Будут устанавливаться полезные нагрузки — косилка либо манипуляторы.
Галерея

Робот-колхозник готов к испытаниям! 
Робот в гараже 
Выезд на картофельное поле 
Робот-колхозник на зимнем выгуле 
Робот-колхозник на зимнем выгуле




