
Наконец-то приехали печатные платы GNSS_board, трафарет для паяльной пасты и компоненты — можно было собирать блок навигации для робота-колхозника! Но всё оказалось не так просто.
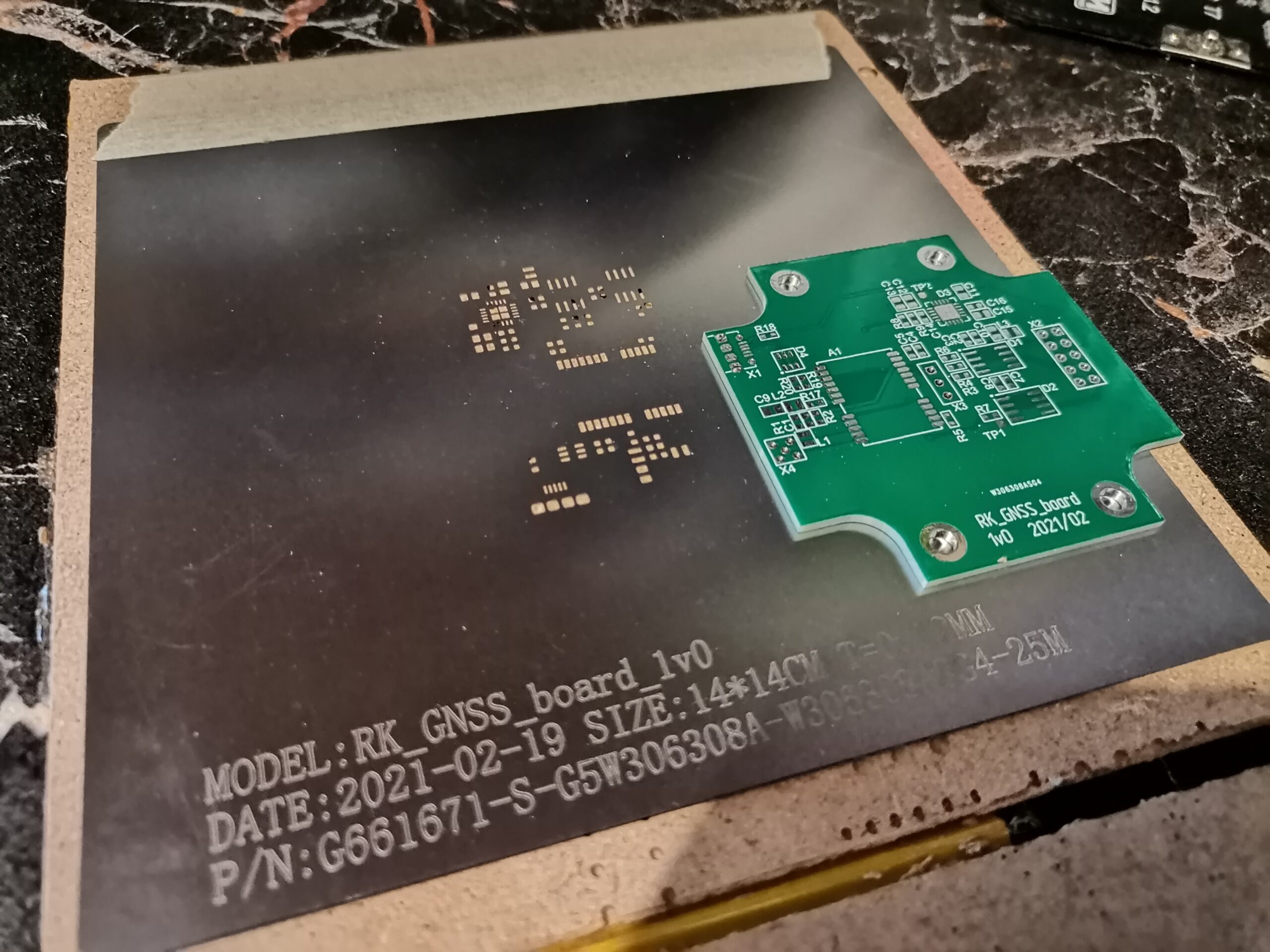
Я пользовался трафаретом впервые, поэтому пайка прошла с переменным успехом — из двух спаянных плат нормально заработала только одна и то со второго раза. Надо было обложить плату со всех сторон такими же платами (или другими, но такой же высоты). А так получилось, что трафарет выгнулся дугой в центре и в этих местах слой пасты оказался толще, чем надо. Поэтому при пайке образовалось несколько замыканий, вызванных растеканием избыточного количества пасты. Но, несмотря на это, сам процесс мне понравился больше, чем ручная пайка. Когда замыкания были побеждены пришло время включать плату)
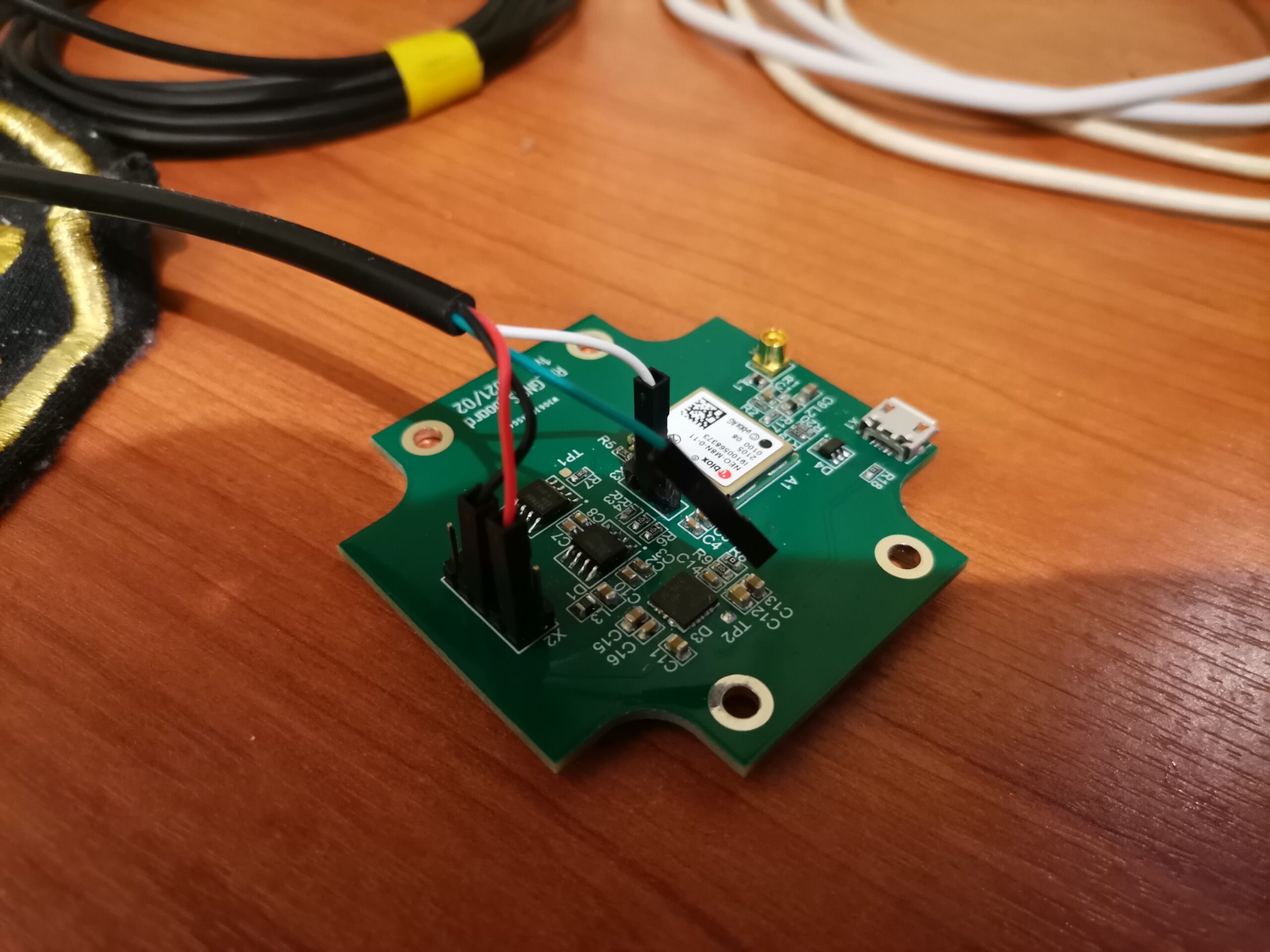
При включении волшебный дым из платы не пошёл и это несколько обнадёжило. Воткнувшись адаптером USB-UART в плату я увидел даже какие-то посылки, приходящие по последовательному порту, издали похожие на навигационные сообщения. Скачав штатную утилиту от U-Blox, я убедился, что она нормально видит приёмник и решил перенести всё это дело на подоконник, чтобы плата увидела спутники. Но сначала надо было собрать всё это в корпус и прикрутить антенну.

Спутники плата сразу увидела, но это было ещё не всё.

Сейчас подключение к блоку шло «из середины» платы — т.е. через UART, тогда как штатное подключение должно осуществляться через RS-422 для уменьшения влияния внешних радиопомех, излучаемых в том числе FPV передатчиком робота. Но преобразователя RS-422/USB у меня под руками не было, пришлось заказывать. А пока я его ждал — было время заняться корпусом.

Так как я всё ещё опасался вредного влияния на плату помех от FPV передатчика (он работает на 1200 МГц — близко к целевому диапазону GNSS систем), то корпус было решено заэкранировать изнутри и покрасить краской снаружи для защиты от ультрафиолета. Сначала я хотел взять полностью алюминиевый корпус, но не нашёл нужного размера. Поэтому корпус был напечатан на 3Д принтере в расчете на последующую экранировку.
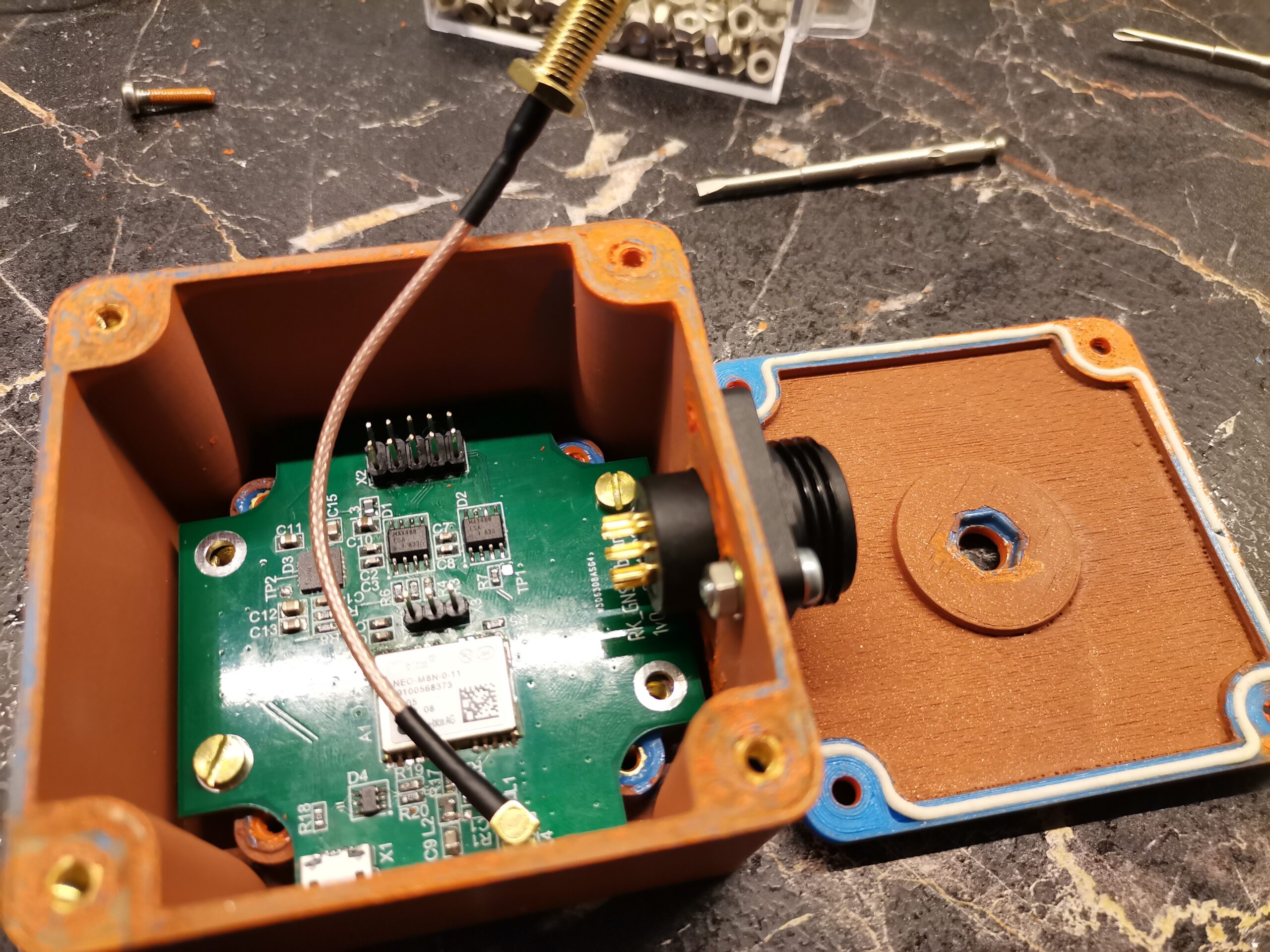
Экранирующее покрытие оказалось адски дорогим, а вот насчет эффективности пока не ясно. При высыхании оно не образует сплошного проводящего покрытия, т.е. случайно замкнуть какие-то торчащие из платы контакты об него нельзя. Это плюс. Но это также и минус, т.к. соединить его с экраном кабеля (и создать сплошное экранирование по всему маршруту) тоже не получится.

Где-то через 3 недели мне наконец-то приехал RS422/USB адаптер и можно было собрать всё в кучку и проверить работу навигационного блока в штатном режиме. Сюрпризов тут никаких не было — всё заработало как положено. Спутники блок видит хорошо. Даже с учетом того, что он видит только полнеба и напротив стоит 27-этажный дом, блок стабильно входит в режим 3D/DGNSS и показывает хорошие DOP’ы — в моменте было HDOP 1.0, PDOP 2.0.
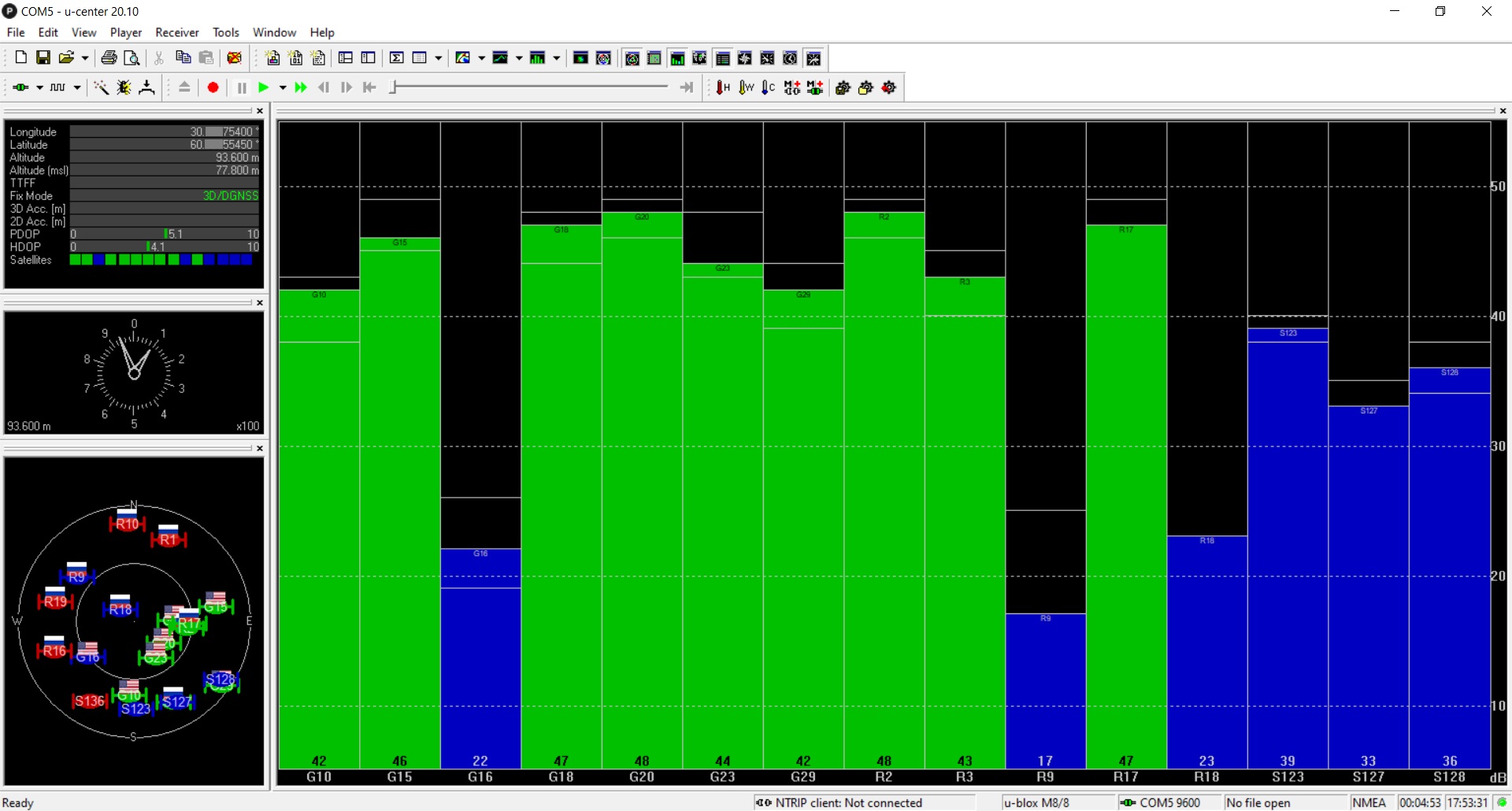
После того, как блок был включен и поймал спутники, я решил проверить его на помехоустойчивость к FPV передатчику. Включение передатчика на расстоянии 0,8-1 м (это расстояние, на котором будет стоять передатчик в роботе) от блока навигации никак не повлияло ни на режим работы GNSS модуля, ни даже на DOP’ы. Даже не знаю, что именно на это повлияло — то ли активная антенна содержит в себе фильтр, то ли включение от разных источников питания, то ли всё-таки экранирование.
В итоге: навигационный блок готов к установке на робота, с трафаретами и пастой надо ещё потренироваться, необходимость экранирования по прежнему под вопросом.
Для таких целей надо использовать RTK или Dual GPS Ublox 9P. Правда они и раньше были недоступны по цене, сейчас еще и не продадут. Точность в 1см легко укладывается, точнее не надо, скорости низкие. А вообще посмотрите проект AgOpenGPS, там мноогое реализовано, но для большой техники. Но свой велосипед всегда роднее ))) это я сам поннимаю
Согласен, точности обычного GPS там не хватает. Когда будут деньги на RTK — прикручу туда другую плату. Хотя ценник на RTK такой, что я даже не знаю когда это случится)