По результатам последних январских испытаний, оказалось, что передатчик видео-сигнала наводит адские помехи на GPS. Это происходит потому, что передатчик имеет довольно большую мощность (1 Вт), а антенна его расположена в 10 см от приёмной антенны GPS. Последнее, понятно, от спешки — не успел нормально установить передатчик до отъезда на испытания — пришлось прилепить его на двусторонний скотч к корпусу блока.

Узрев, что творится с GPS’ом при включенном передатчике FPV, я понял, что надо менять компоновку. К тому же — для нормальной навигации мне нужен будет курс, который, в моём случае, проще получить по данным с двух GNSS приёмников, разнесённых по бортам робота. Но просто вынести комплектный GPS на бортовую раму не представляется возможным, т.к. там низковольтный UART, а рядом мощный радиопередатчик. Да и штатная антенна меня не очень устраивала — хотелось чего-то получше, а в этом GPS модуле (здесь имеется в виду модуль — как законченное устройство, сам u-Blox позволяет подключать активную антенну) нет возможности внешнюю подключить.
Итого, я пришел к мысли, что пора начинать клепать своё железо для робота. Состав платы был максимально прост и лаконичен:
- GNSS приёмник стандартной точности u-Blox NEO-M8N;
- RS-422 трансиверы для вывода навигационных данных и PPS сигнала;
- Micro USB разъём для удобства настройки на столе;
- Линейный преобразователь TPS7A8300 для питания GPS модуля;
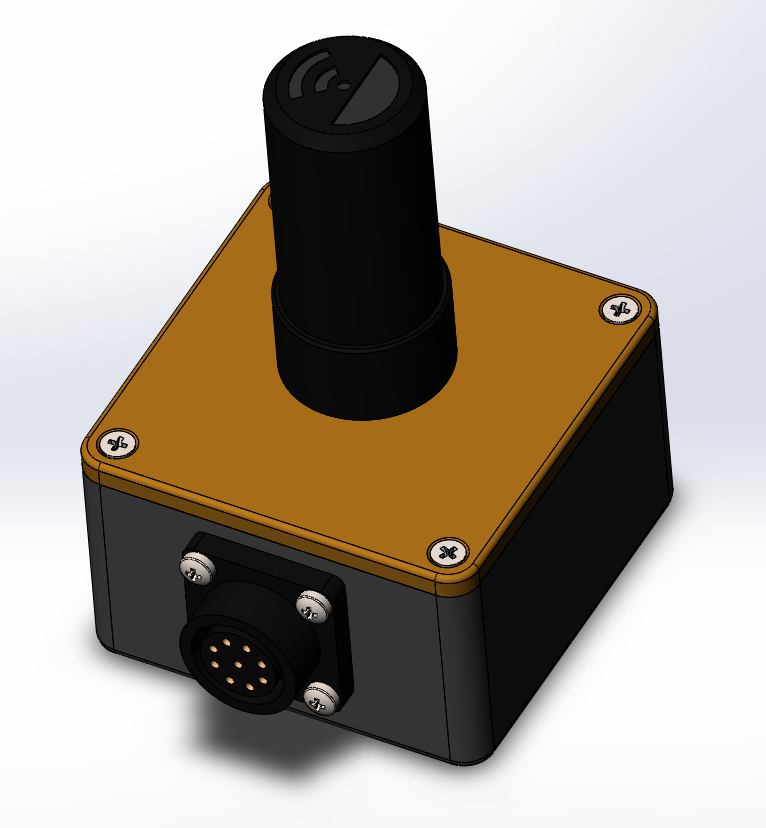
Изначально я предполагал разместить плату в алюминиевом корпусе, чтобы ещё больше снизить влияние внешних помех. Однако, к моему удивлению, в продаже не нашлось ни одного толкового алюминиевого корпуса подходящих размеров. То прямоугольные какие-то, то низкие слишком — а мне же ещё фланец разъёма туда прикручивать надо. Так ничего подходящего и не найдя, я решил напечатать свой корпус (с блэкджеком и шлюхами!) на 3Д-принтере. Корпус из PLA не очень подходит для эксплуатации на открытом воздухе, поэтому его придется красить снаружи, а также наносить какое-нибудь экранирующее покрытие изнутри. Это не очень удобно, но позволило мне получить корпус с удобными для меня размерами.
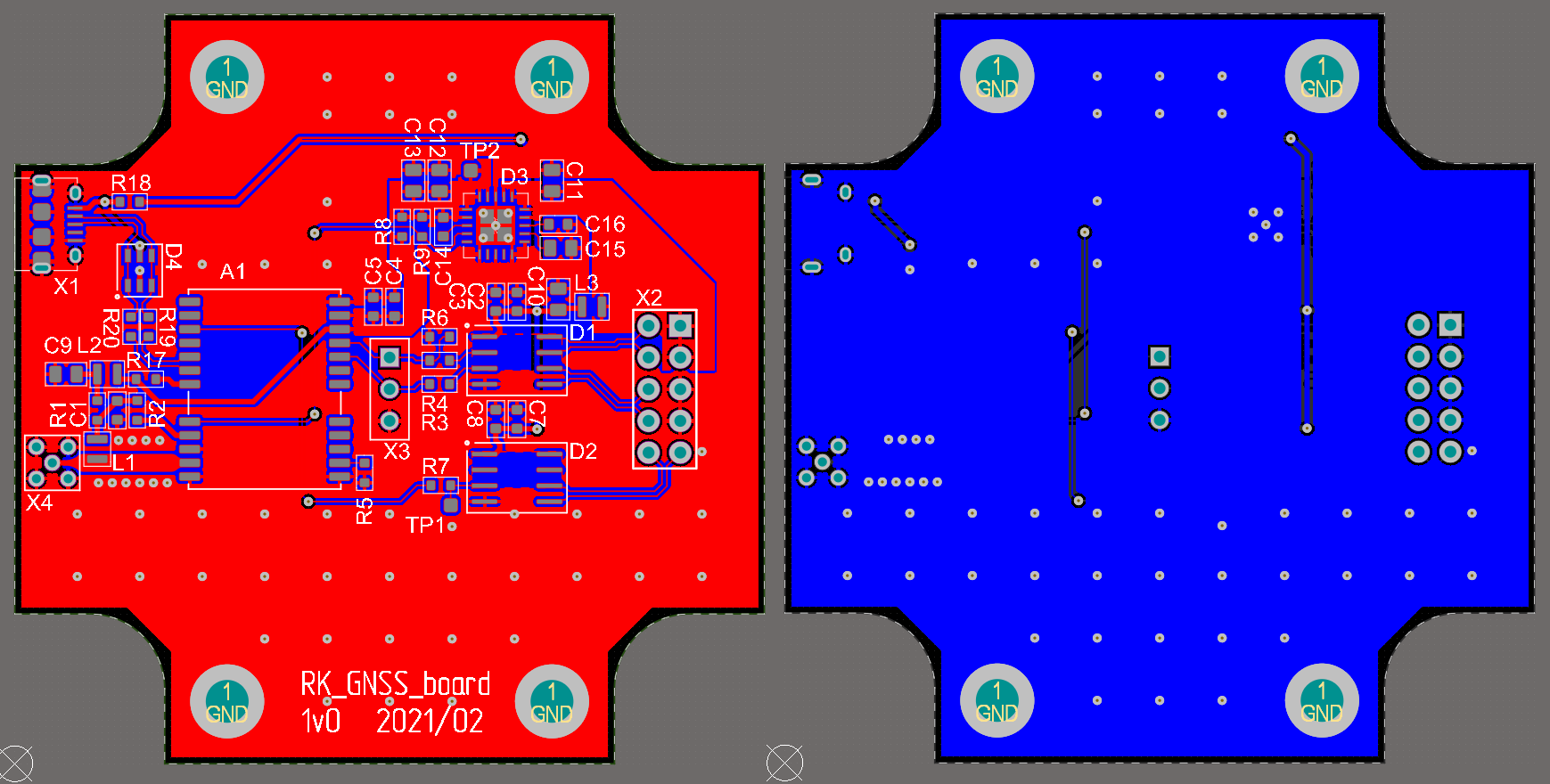
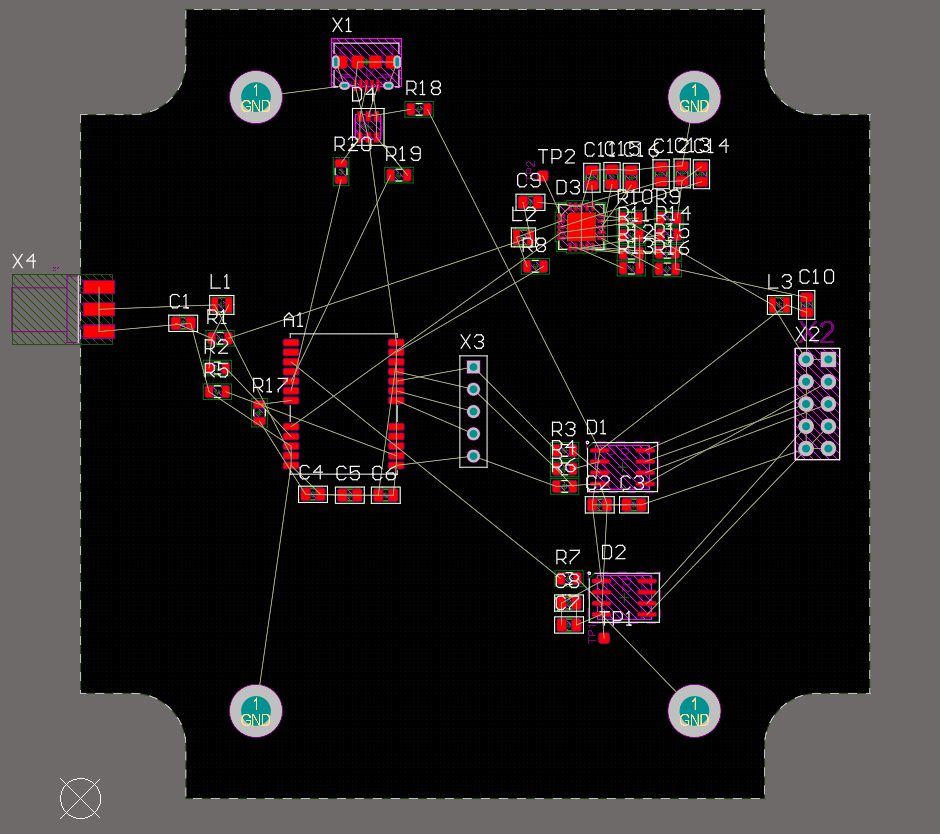
В результате разводки плата уменьшилась в размерах с исходных 100х100 мм до 60х60 мм. Можно было ещё уменьшить, убрав пустые места сверху и снизу, но практического смысла в этом не было — корпус всё равно квадратный.
По хорошему, входная ВЧ цепь на модуль должна быть выполнена с импедансом в 50 Ом. Получить такой импеданс на 2-слойной плате не получилось по техническим причинам (ширина дорожки должна быть больше, чем расстояние между контактными площадками). Но разница в цене между 2-х и 4-хслойной платой очень уж большая. Поэтому рискнул и сделал сужения там, где ширина дорожки не позволяла подключиться. Импеданс там уже будет не 50 Ом, но при такой небольшой длине (около 10 мм) дорожки не должно сильно повлиять. Посмотрим, как будет работать, если что — потом переделаю на 4-хслойку.
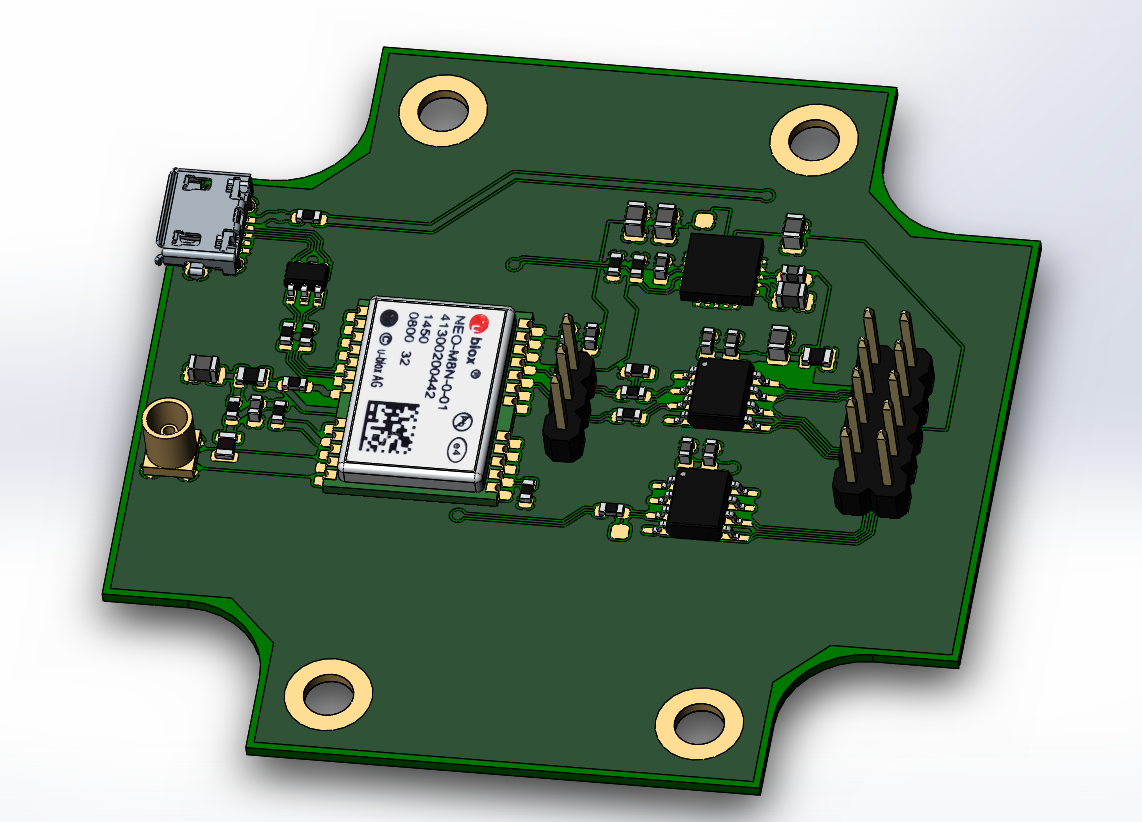
Для того, чтобы сделать нормально механическую сборку — пришлось перенести плату в Solidworks. Единственное, чего я так и не понял — как переносить шелкографию — чтоб было совсем красиво.
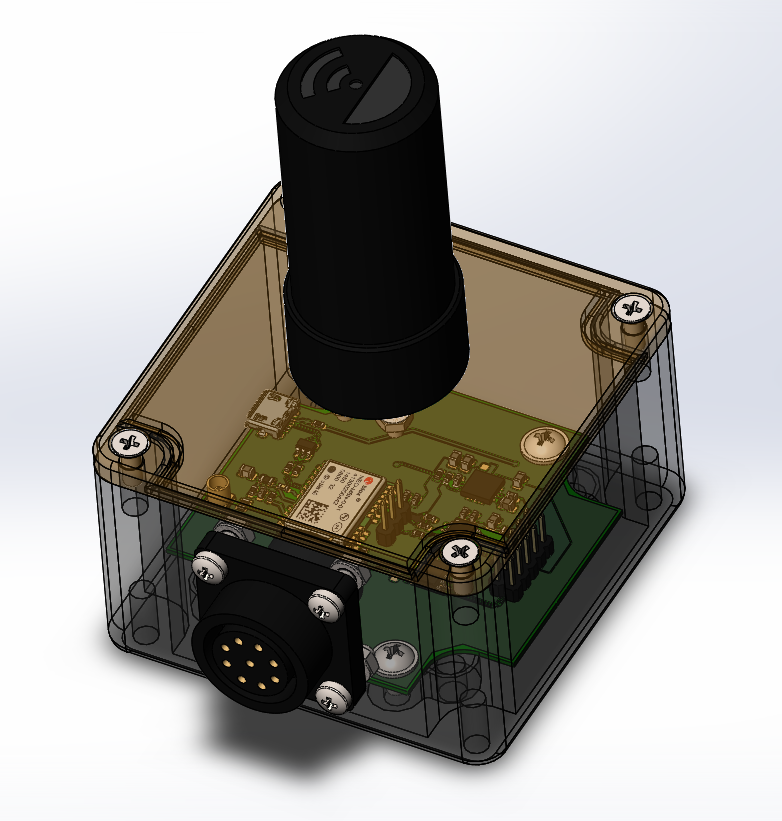
Конструкция блока получилась следующая. Плата крепится к основанию корпуса 4-мя винтами М3, закручивающимися в заплавляемые резьбовые втулки. Ещё 4 отверстия в нижней части корпуса — сквозные. Через них блок будет крепится к стальному уголку на бортовой раме. В верхней части установлен разъём SMA с фланцем. Разъём соединяется пиг-тэйлом (жгутом) с MMCX разъёмом платы. Сверху на SMA разъём накручивается миниатюрная активная антенна. Габаритные размеры блока получились — 68 х 68 х 42 мм.