На август этого года запланированы большие работы по доработке и испытаниям робота. Значительная часть этих работ будет направлена на изменение конструкции машины.
Во время прошлых испытаний был выявлен существенный недостаток — после монтажа проводов машина перестала разбираться на составные части, т.к. кабели неизбежно должны идти от центрального отсека к бортам. Кроме того, неполная разборка (как на картинке) не позволяла существенно уменьшить габариты составных частей для перевозки. Для этого требовалась разборка центрального лотка с оборудованием — а это трудоемкий процесс, прежде всего из-за того же объемного монтажа кабелей.
Для устранения этих недостатков было принято решение внести следующие изменения в конструкцию.
Блок управления
Прежде всего, будет добавлен блок управления, в котором будет смонтирован автопилот, блоки питания и прочее вспомогательное оборудование.
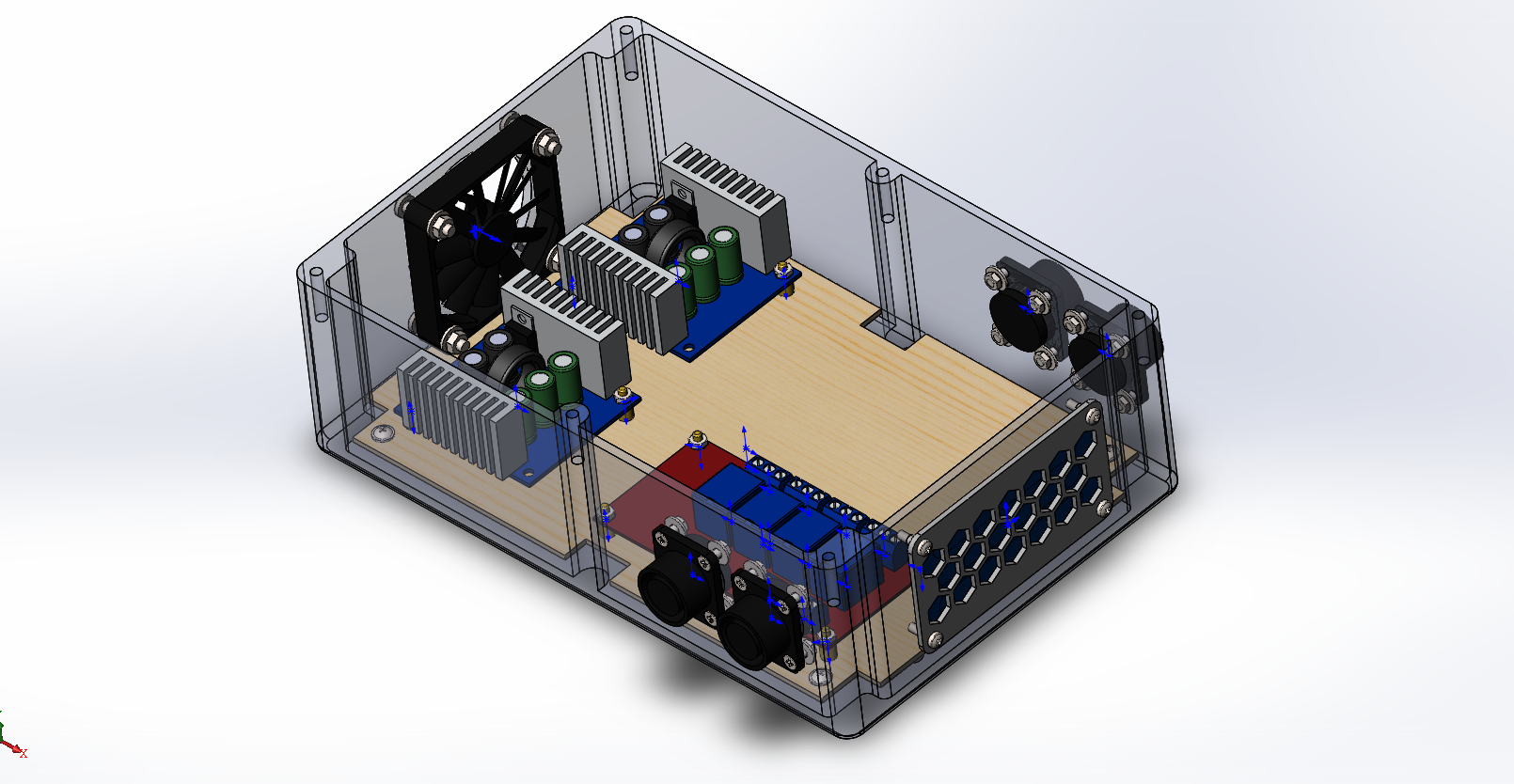
В корпусе будут смонтированы два DC/DC преобразователя: один =24В/12В, второй =24/5В. Так как у нас напряжение бортовой сети 24В, а потребители могут быть самые разные — не всё удается найти под 24В. Также в корпусе будет располагаться автопилот (в модели пока не прорисован — нет размеров, а сам АП ещё не приехал), который будет управлять движением машины. На данном этапе это будет Pixhawk 2.4.8, позже, возможно, его надо будет заменить на что-нибудь более подходящее по форм-фактору. Кроме того, в корпусе будут установлены разъёмы для вывода управляющих сигналов к бортам — управляющие для драйверов и питание.
Центральный отсек
Будет изменена конструкция лотка для оборудования — вместо него появится центральный отсек.
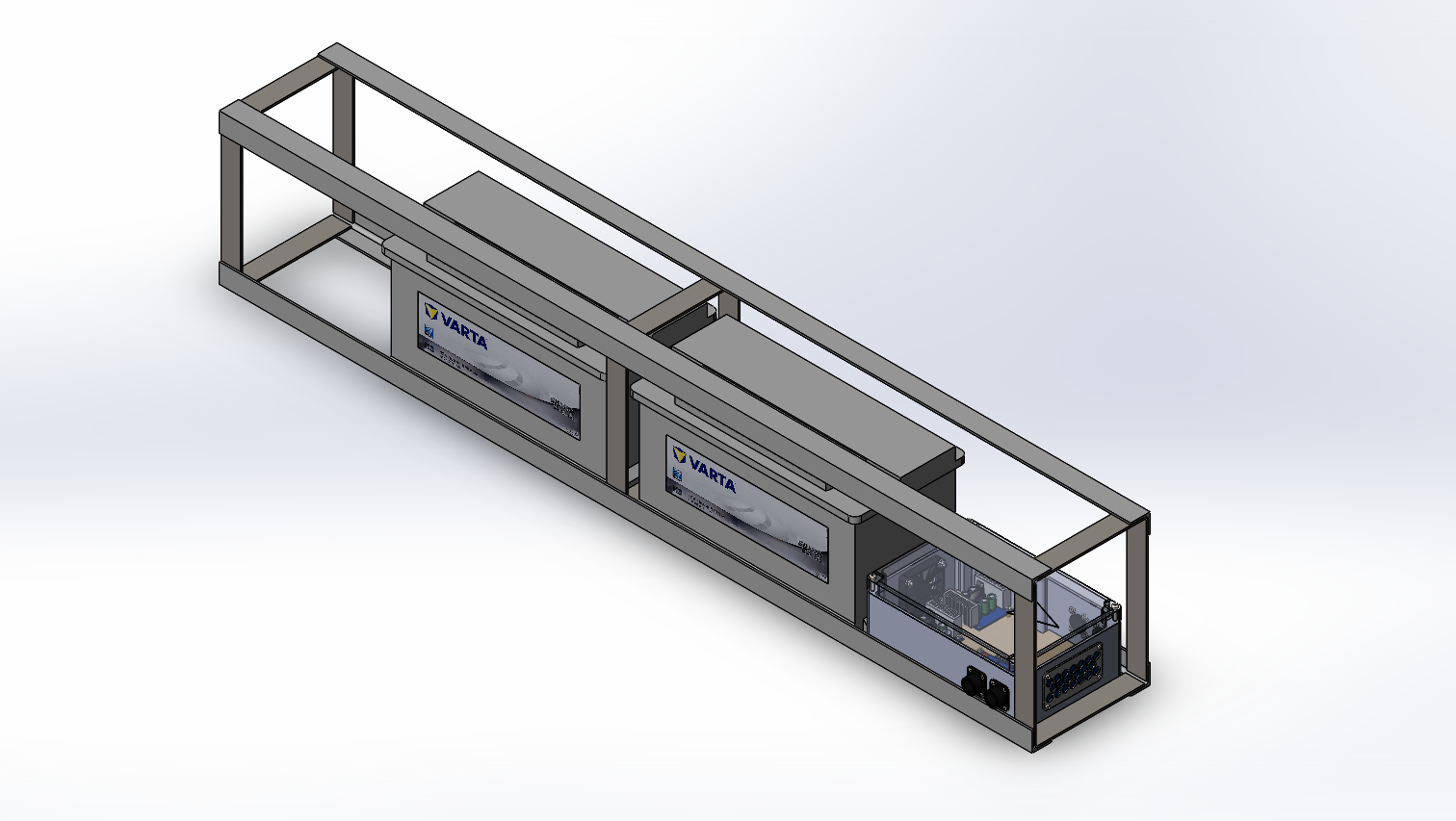
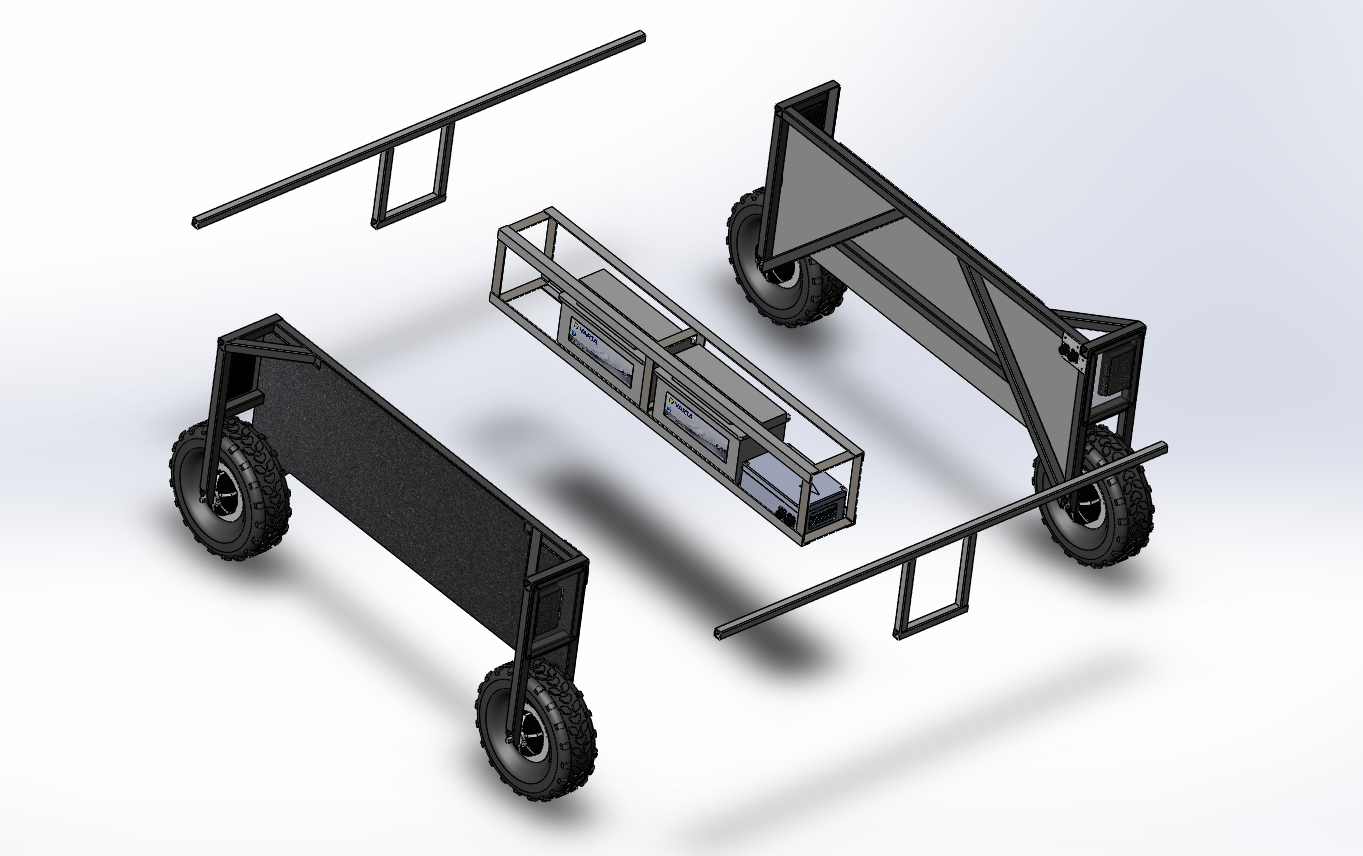
В отсеке будет располагаться блок управления, аккумуляторы и другое оборудование. Все подключения к бортам или полезной нагрузке будут производиться через разъёмы на блоке управления. Такая концепция позволяет вытаскивать центральный отсек из поперечных элементов целиком. Так что неполная разборка будет обеспечивать разделение на менее габаритные части без снятия объёмного монтажа. В новой конфигурации машина будет разбираться на 5 больших частей: два борта с колесами и монтажом, два поперечных элемента и центральный отсек с оборудованием.
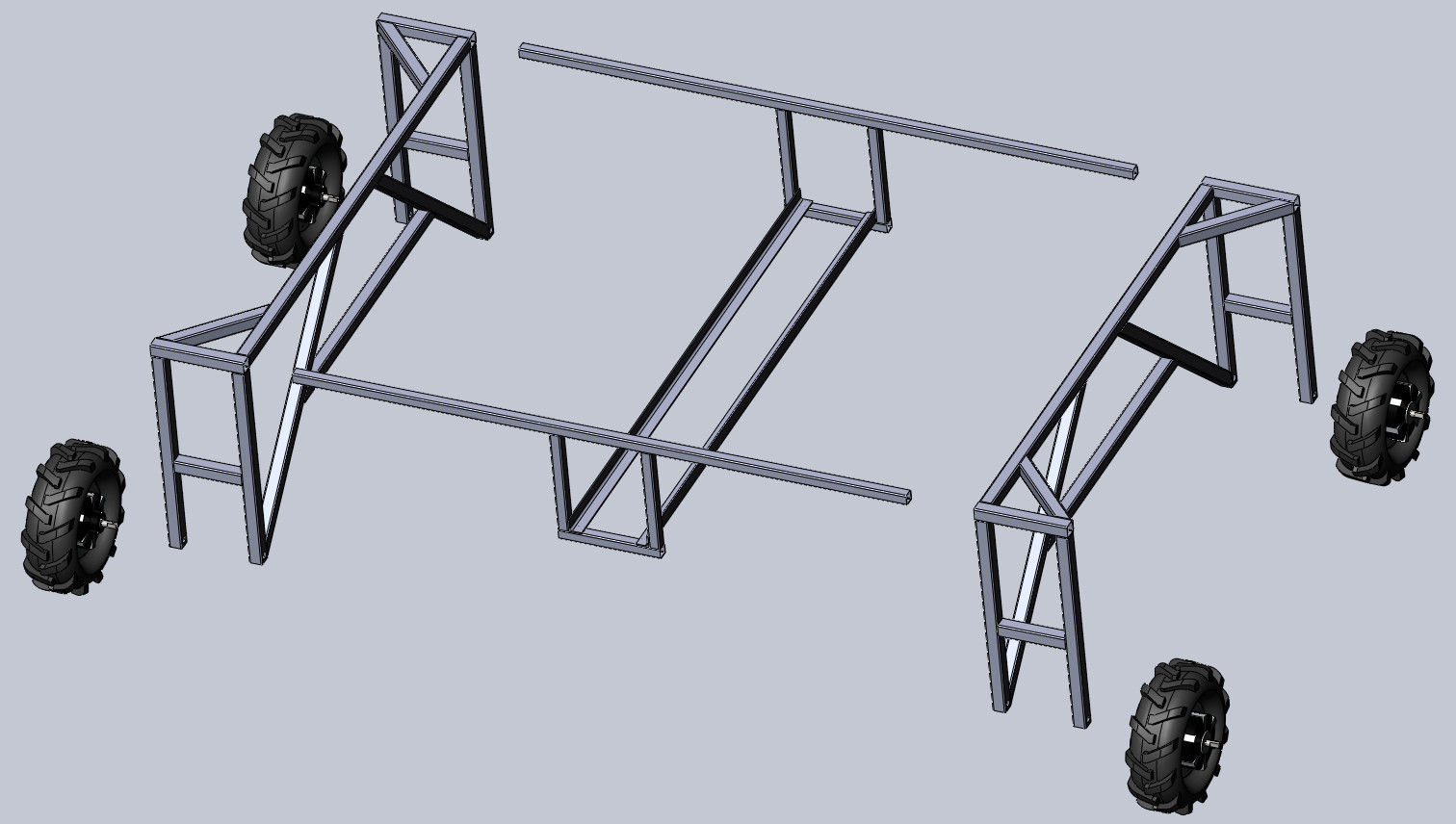
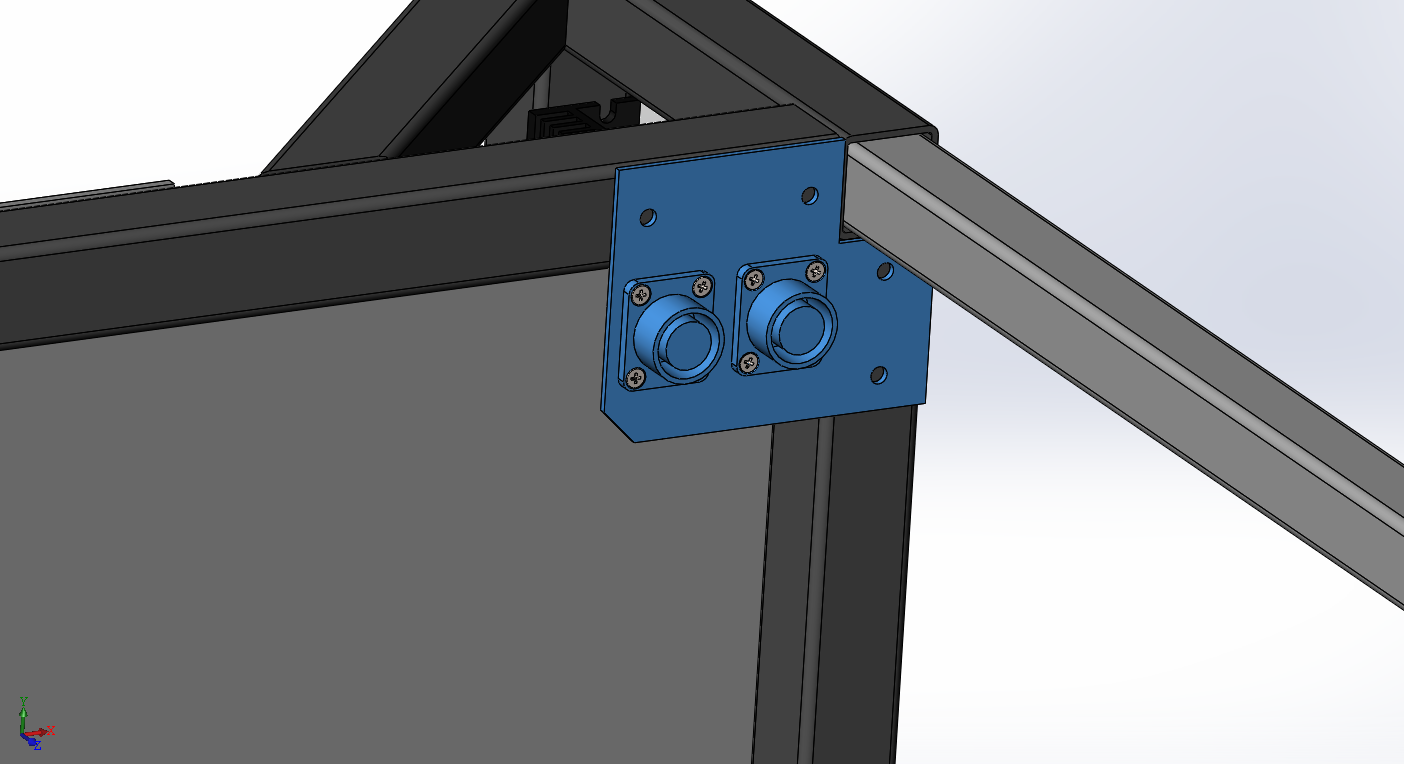
Борта
Для обеспечения вышеописанной концепции в конструкцию бортов также надо внести изменения. На бортовые рамы спереди добавятся панели с разъемами, через которые в борта будет заходить питание и сигналы управления драйверами и полезными нагрузками бортов (если таковые будут).
Кроме того, добавятся бортовые экраны для разграничения рабочей зоны от внешнего пространства и щитки на драйверы для защиты от механических воздействий.

Солнечные панели
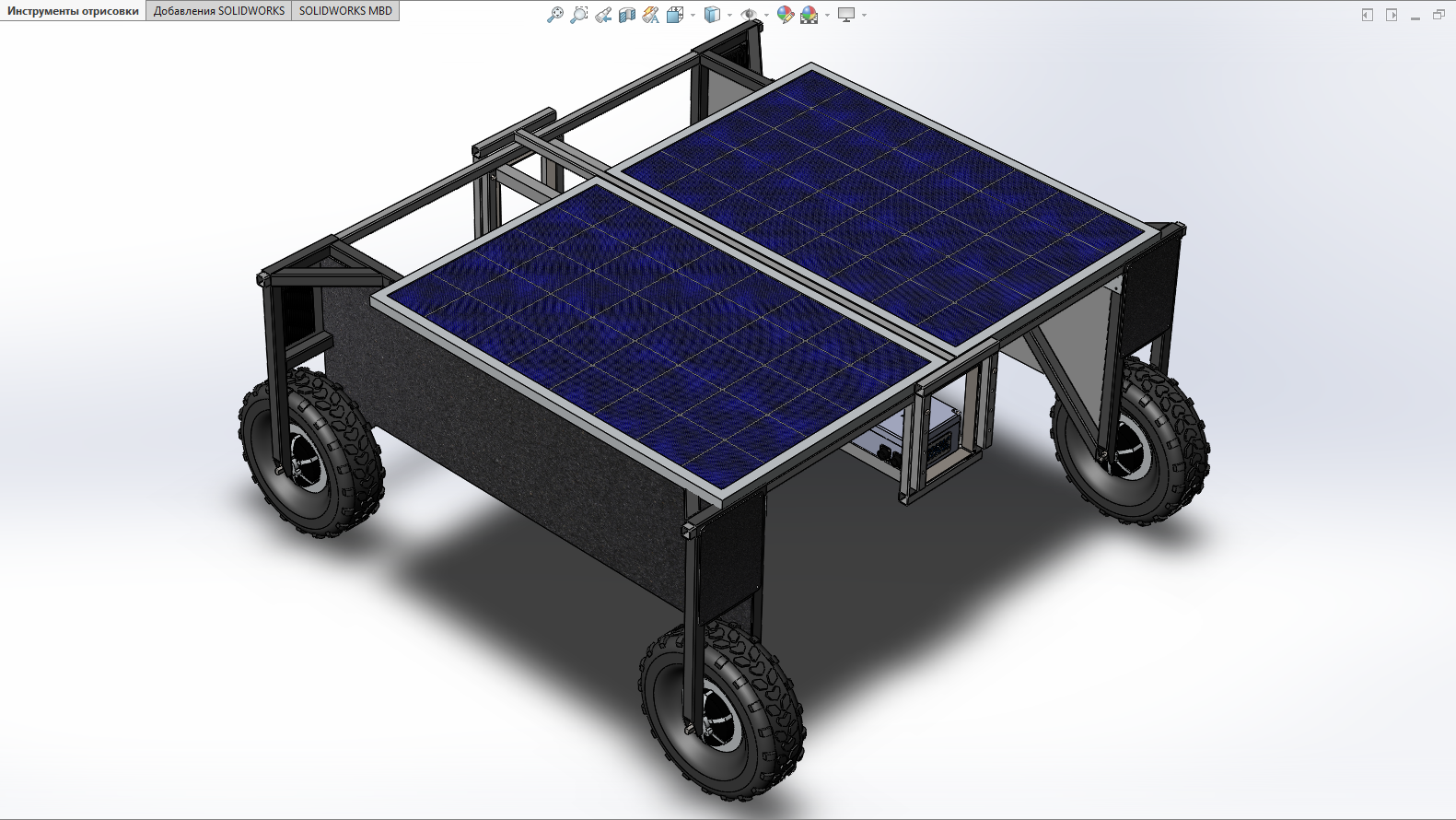
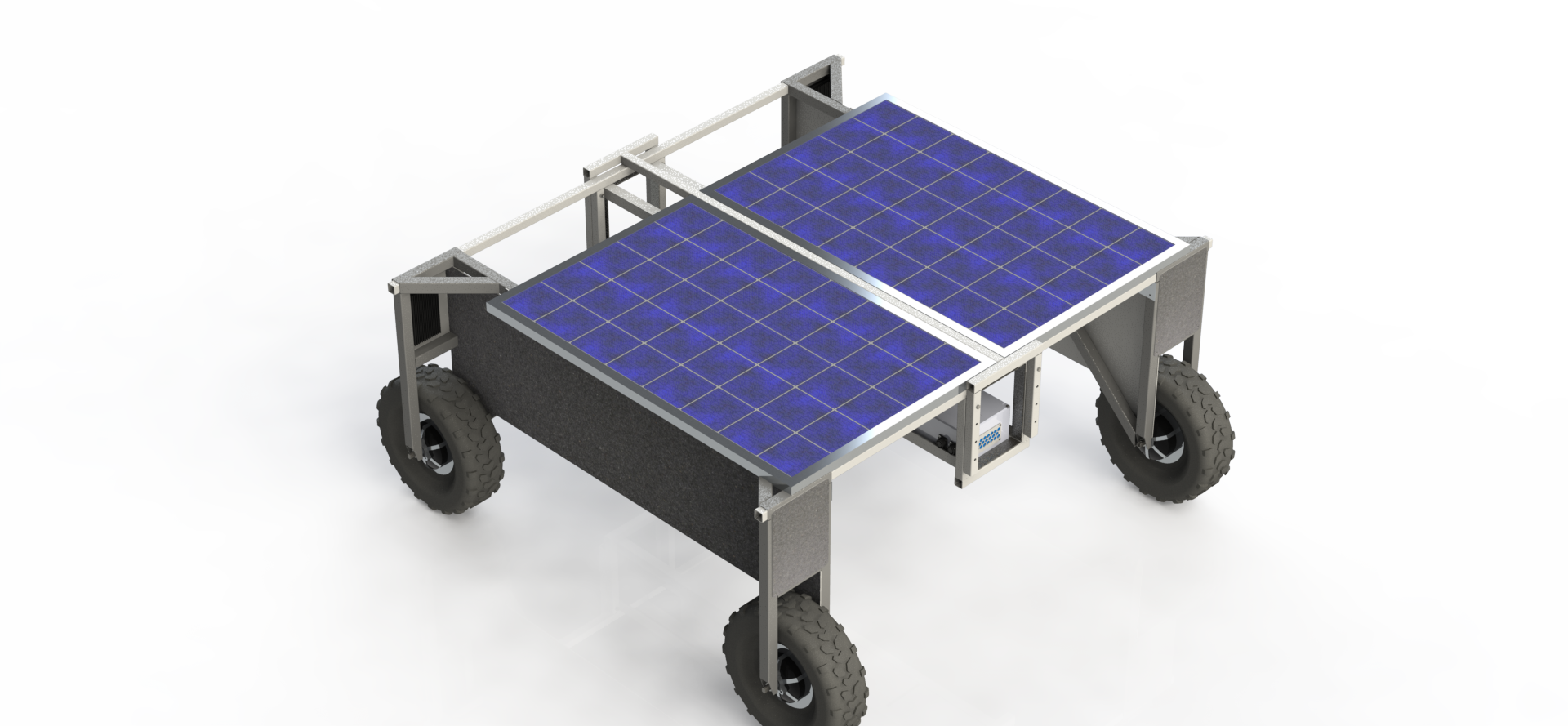
Самое интересное. Машина будет эксплуатироваться преимущественно в летний период (где-то с мая по сентябрь), когда значения инсоляции (солнечного излучения) максимальны. Робот полностью электрический, а значит было бы глупо не воспользоваться дармовой энергией. Поэтому верхнюю часть робота решено было оснастить двумя солнечными панелями по 100Вт каждая. Этого, разумеется, не хватит для полноценного питания робота, но панели могут увеличить время работы от одного комплекта батарей. Кроме того, робот будет заряжаться во время простоя.
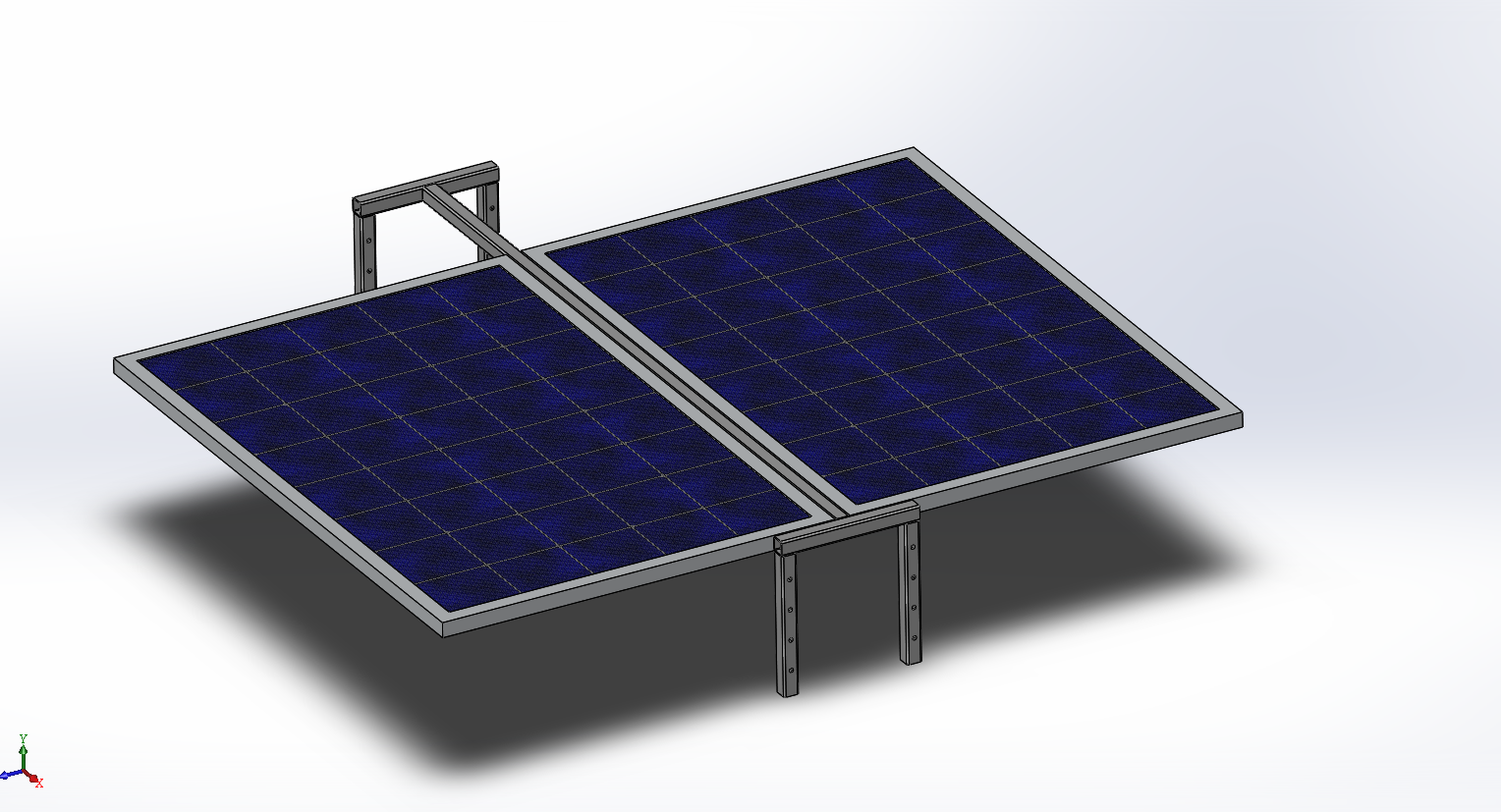
Чтобы прикрутить панели сверху робота, пришлось нагородить вот такую конструкцию. Вся эта хрень крепится в отверстия на торцевой части поперечных элементов и фиксируется болтами. Может перестёгиваться на другие отверстия, изменяя тем самым высоту подъёма панелей над верхней плоскостью рамы. Это потребуется, если нужно будет устанавливать негабаритные полезные нагрузки, которые не влезают во внутреннее пространство. Например, бункер для сбора картофеля.
В сборе всё это будет выглядеть вот так