Говорят, что первые 40 лет самые трудные в жизни мальчика. Так как большая часть этого пути мной уже пройдена, то настало время отжечь по-большому). Настало время переходить к большим игрушкам!
Всё началось тогда, когда были выкованы кольца в Россию был коварно завезен картофель. С тех пор не знает крестьянин ни сна ни отдыха, надрываясь в попытках вырастить импортный корнеплод. В моем случае это означало, что и без того малоприятный август ежегодно омрачается веселой мультиплеерной игрой под названием «выкопай картошку». Игра крайне увлекательная, но только первый раз — потом уже не интересно. Суть ее в том, чтобы после картофелекопалки подобрать картофель и сложить его в одно место (обычно, в мешки или на телегу). Подбирать картофель после копалки несравнимо легче, чем выкапывать его руками по одному кусту. Но всё равно, это занятие долгое и трудоёмкое.

Я всегда считал, что заставлять мыслящее существо заниматься однообразным тяжелым трудом негуманно, а подбирать за машиной вообще унизительно:) Поэтому с раннего детства я пытался придумать какой-то способ автоматизировать процесс сбора картофеля. Часто бывает так, что какая-то идея/проект крутится у тебя в голове довольно долго, но все никак не знаешь как к ней приступить, а потом как будто щелкает реле и ты начинаешь реализацию. Так было и на этот раз. Давно зревшая идея картофелеподборщика наложилась на внезапно проснувшийся интерес к беспилотным аппаратам.
Было решено сделать беспилотную наземную машину (UGV — Unmanned Ground Vehicle), которая будет сама ездить за копалкой и подбирать картофель. Потом пришла идея расширить функционал и выполнять с помощью этой тележки и другие операции из жизненного цикла картофеля — например, опрыскивание (обработку от жуков). Кроме того, тележку можно использовать и для других операций, не связанных с сельским хозяйством — патрулирование территории, например.
Общая концепция тележки получилась такая:
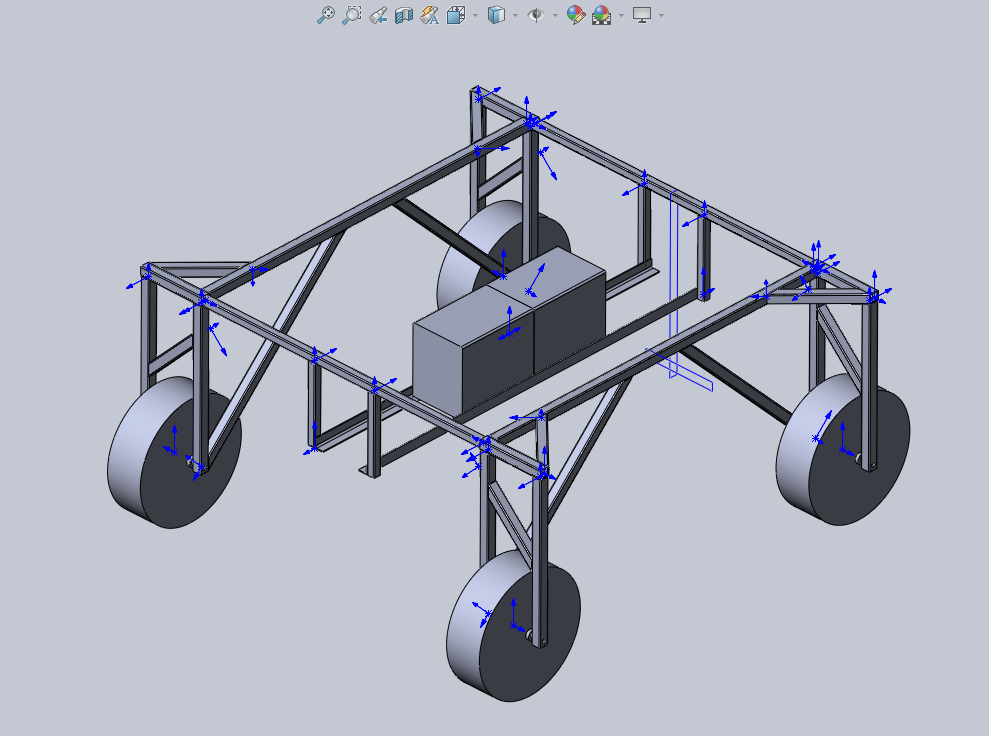
- платформа должна иметь чудовищно высокий клиренс (чтобы иметь возможность ездить по бороздам и не ломать картофельную ботву);
- для этих же целей ширина колеи должна меняться (ширина борозд у всех разная, как выяснилось);
- платформа должна использовать для выполнения всех операций только электричество — так проще управлять;
- для упрощения конструкции было принято решение сделать все колеса фиксированными, а поворот осуществлять по-танковому (одна сторона включается вперед, другая — назад);

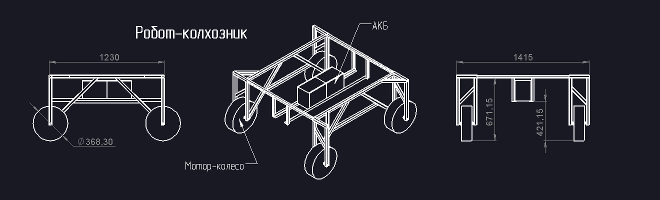
Первоначально проект получил название PanzerKartoffelnWagen (с панцером его роднила только механика поворотов, но название уж больно хорошее). Однако, название не прижилось и пришлось заменить его на более простое — Робот-колхозник.
Поставленные задачи крайне амбициозны и неподъёмны ни для одного человека ни даже для небольшой команды, но мы всё равно приступим к этому проекту. Потому что это интересно! По сути, изложенная концепция — это первый подход к такому типу проектов и к сельхоз-роботам в частности. Основная задача тут — выявить главные сложности и оценить трудоемкость разных этапов, а также понять, где его ещё можно применить. И уж тем более этот робот не является заменой нормального картофелеуборочного комбайна, который работает быстрее и эффективнее.
На первом этапе планируется только создать саму платформу и просто покататься с использованием дистанционного управления. Потом нужно будет научить робота ездить самостоятельно по указанному маршруту (желательно, ни с кем не сталкиваясь). Габариты робота будут внушительные — где-то 130х130 см и масса пустого около 80 кг. В этих условиях надо будет уделить особое внимание безопасности при автономном управлении.
Одним словом — задачка сложная, интересная. Хватит для того чтобы поиграться лет до 40-ка))
Ссылки:
видео с картофелекопалкой — https://www.youtube.com/watch?v=FGA3QcUMCn0